
Abstract: This paper proposes the application of virtual prototype technology in the process of simulation research of industrial robots, and studies and develops the virtual prototype system of industrial robots. Firstly, the virtual prototyping technology is described and its key technologies are analyzed. Then the composition of the industrial robot virtual prototyping system and the research content of the prototype system in the robot simulation research are explained. Summarize this technology mainly to solve the following two problems, namely the system integration in the robot simulation research and provide the bottom digital environment for the virtual design and verification environment of the robot-based production line.
1. Introduction Vimud Prototype (VP) is an emerging technology in the current design and manufacturing field. This technology integrates product information into the visual virtual environment provided by computers through computer technology such as CAD/CAM/CAE. Product simulation, analysis and optimization before manufacturing. Robot simulation is an important part of robot research. It can be applied to robot kinematics, dynamic analysis, trajectory and path planning, robot interaction with work environment, offline programming and so on. With the development of advanced manufacturing technologies such as virtual manufacturing and digital manufacturing, robot simulation has become an important part of the entire digital design, verification, and manufacturing environment surrounding the product life cycle. The research and development of robotic virtual prototyping system can complete the above research work in the virtual environment and provide new methods for robot research and advanced manufacturing technology development.
2. Virtual Prototype Technology The virtual prototyping technology involves multi-body system kinematics and dynamic modeling theory and its technical implementation. It is based on advanced modeling technology, multi-domain simulation technology, information management technology, interactive user interface technology and virtual reality. Comprehensive application technology. , 1P technology in the design of the initial stage - the conceptual design stage can be a complete analysis of the entire system, observe and test the mutual movement of the various components. System simulation software can simulate the movement of the system in the virtual environment. The design defects can be easily modified on the computer. Different design schemes can be simulated. The system can be continuously improved until the optimal design scheme is obtained. Physical prototype.
The virtual prototype design method reflects the concept and idea of ​​concurrent engineering. It is the development direction of advanced manufacturing technology in the future. Compared with the traditional method, it has many advantages, that is, it can determine the key parameters during the design period, update the product development process, shorten the development cycle, reduce costs and improve product quality. The key technologies of virtual prototypes include the following:
1) System Integration The virtual prototyping solution involves various technologies. The virtual prototyping execution environment needs to be converted between different systems. Its integration includes the following aspects:
â— Create a three-dimensional model of the mechanical system in the CAD environment and perform a simple analysis of sports performance;
â— Convert the geometric model into a geometric model in the CAD system, and import the virtual prototype analysis system to perform kinematics and dynamic analysis;
â— The load in the virtual prototype is passed to the finite element analysis software, and the latter's analysis results are passed back to the virtual prototype.
â— The specification of the production line model and its control system is integrated with the virtual prototype.
2) System parameterization To establish a parametric virtual prototype system, the virtual prototype system can be repeatedly tested on the premise of multiple simulation parameters, and the simulation output results under various conditions are analyzed and compared to lay the foundation for further system optimization.
3) System Optimization Virtual Prototyping Solution Under the premise of multi-parameters and virtual verification of the system, the designer needs to select a solution to provide optimized system parameters and design results.
4) System Visualization and Interactivity The system provides a good model display environment, enabling the operator to have a high sense of immersion. Due to the advantages of visualization, the designer can interactively explore the functions of the virtual mechanical system during the design process, simulate the real environment and repeatedly debug the virtual prototype, and fully integrate their own experience and capabilities into the design process of the computer's virtual prototype. .
3. Industrial robot virtual prototype 3.1 Robot digital virtual prototype system The robot virtual prototype system combines robot research and virtual prototyping technology, aiming at kinematics, dynamic analysis, trajectory and path planning in the robot design and manufacturing process, and robots. The technical content of the interaction with the work environment and other technical contents are used for research and system development. In the virtual environment, the design and analysis of the robot and the realization of the virtual production process are completed. The specific structure of the system is shown in Figure 1.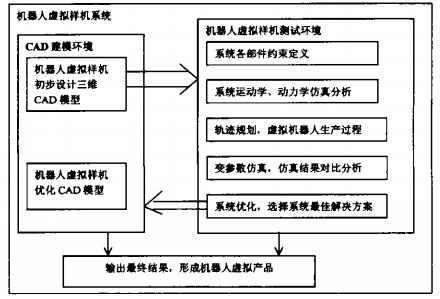
3.2 Functions and Technical Features of Robot Virtual Prototyping System The core function of the robotic virtual prototyping system is to provide a virtual environment for robot design and development on a computer. Its main functions are as follows:
1) Visualization of the robot virtual prototyping system Visualization is the basic work of the virtual prototyping system, and CAD geometry modeling is the core. The robot virtual prototype visualization environment has the following features:
â— The visualization environment of the robot manipulator is realized on the computer, and the operator can intuitively and efficiently perform the design and development of the robot on this basis. The good environment enables the operator to conveniently dissolve his/her own experience and knowledge at any time;
â— Extract geometric data from the CAD model and use it in further working processes of the virtual prototyping system, such as motion analysis and dynamic simulation;
â— At different stages of virtual prototype development, robot CAD models differ in structure. During the initial design phase of the prototype, the CAD geometric model of the robot may be sketchy. It is only necessary to meet current design needs. Some detailed geometric structures may not be modeled; in the detailed design stage, the prototype is repeatedly verified and improved, and the system is optimized. The geometric data can be used to perform detailed geometric modeling of the prototype to form the robot simulation results of the entire virtual prototype.
2) The robot work process is pre-determined. According to the robot manipulator body composition, including the various parts of the geometry and parameters, the number of joints, types and other factors, through the forward and reverse motion equations to solve the simulation of the robot's motion analysis. At the same time, in the process of motion analysis, it is also possible to carry out simulation research on the robot's motion space analysis, work trajectory planning, collision, and interference check.
3) Dynamic analysis of robot virtual prototyping Dynamic analysis is performed by adding physical information, such as the type, quality, rotational inertia, joint friction and other physical factors of the manipulator in the virtual prototyping system. In the process of dynamic analysis, it is possible to simulate the actual working conditions of the robot manipulator to preload the virtual prototype, or to apply the force of gravity, so as to analyze the force of each part of the prototype in various working conditions, to study the key links, and optimize the system structure. .
4) Robot Control System Simulation The robot virtual prototype can provide the control system simulation environment and test the control system. In this respect, the virtual prototype has obvious advantages over the physical prototype. Various control methods can directly act on physical prototypes, saving time and efficiency, without worrying about erroneous control methods resulting in damage to the prototype.
The robot virtual prototype system has the following technical features:
1) Provide integrated system for robot simulation research and digital robot design and verification. The environment robot virtual prototyping system provides a unified data platform including digital modeling, visualization of motion process realization, kinematics analysis, and control system simulation, enabling each part of the The simulation and analysis results are used in a timely and efficient manner to provide a digital research environment.
2) The organic components that make up the digital virtual manufacturing environment The industrial robot is the basic working unit in the manufacturing system. The robot virtual prototyping system can effectively dissolve the digital processing and manufacturing environment at a higher level and meet the upper production line of the robot work unit in the virtual manufacturing environment. Simulation and digital plant requirements form the basis and organic part of the digital robot production line.
3.3 The technical means of the robot virtual prototype system 3.3.1 The use of high-level geometric modeling tools With the development of software technology, commercial three-dimensional modeling software such as Pro/E, UG and SolidWod ~ can already be successfully Works on a computer platform without the need for a professional graphics workstation. All of these softwares can establish a high fidelity virtual prototype machine geometry model, and at the same time have a variety of geometric data conversion formats such as IGES, STEP and Parasolid to provide the geometric data needed during the design and testing of robot virtual prototypes. Prototyping geometry development tools.
3.3.2 Development Tools for Robot Virtual Prototyping Systems There are two types of development tools for robotic virtual prototyping systems. One is the use of generic software development tools, and the other is professional virtual prototyping or robot development software. The former is currently more commonly used in C + +, earlier Fortran, Pas. Cal and so on. The features of the robot virtual prototyping system developed using general-purpose software are that the software is highly targeted and solves the designer's specific problems. However, to establish the necessary detailed and correct models for the kinematics and dynamics of prototypes requires a lot of time and effort, and the developed systems have poor flexibility and are difficult to adjust.
Adams, Envision, etc. are commercial virtual prototyping tools...1, software can create simple geometric models or external robot CAD models that have already been established. The system provides kinematics, dynamics, and other aspects of simulation capabilities, and builds robots. Virtual prototype design and optimization environment, and has a perfect simulation results data processing capabilities. Software allows designers to free themselves from tedious robotic dynamic modeling processes and devote more energy to the virtual design and verification process of prototypes.
4. Concluding remarks The virtual prototyping technology is applied to the field of robot simulation research, and the research and development of virtual prototyping of robots is carried out. On the one hand, the scope of research and application of virtual prototyping technology is expanded. At the same time, the design and analysis of robotic products under the virtual environment is also a digital design in the future. The direction of manufacturing. Through the application of virtual prototype technology in robot simulation research, designers can be freed from the tedious calculation process, invest their energies into the analysis and optimization process of the virtual prototype system, effectively perform system evaluation, and provide optimization before actual production. Design products.
1. Introduction Vimud Prototype (VP) is an emerging technology in the current design and manufacturing field. This technology integrates product information into the visual virtual environment provided by computers through computer technology such as CAD/CAM/CAE. Product simulation, analysis and optimization before manufacturing. Robot simulation is an important part of robot research. It can be applied to robot kinematics, dynamic analysis, trajectory and path planning, robot interaction with work environment, offline programming and so on. With the development of advanced manufacturing technologies such as virtual manufacturing and digital manufacturing, robot simulation has become an important part of the entire digital design, verification, and manufacturing environment surrounding the product life cycle. The research and development of robotic virtual prototyping system can complete the above research work in the virtual environment and provide new methods for robot research and advanced manufacturing technology development.
2. Virtual Prototype Technology The virtual prototyping technology involves multi-body system kinematics and dynamic modeling theory and its technical implementation. It is based on advanced modeling technology, multi-domain simulation technology, information management technology, interactive user interface technology and virtual reality. Comprehensive application technology. , 1P technology in the design of the initial stage - the conceptual design stage can be a complete analysis of the entire system, observe and test the mutual movement of the various components. System simulation software can simulate the movement of the system in the virtual environment. The design defects can be easily modified on the computer. Different design schemes can be simulated. The system can be continuously improved until the optimal design scheme is obtained. Physical prototype.
The virtual prototype design method reflects the concept and idea of ​​concurrent engineering. It is the development direction of advanced manufacturing technology in the future. Compared with the traditional method, it has many advantages, that is, it can determine the key parameters during the design period, update the product development process, shorten the development cycle, reduce costs and improve product quality. The key technologies of virtual prototypes include the following:
1) System Integration The virtual prototyping solution involves various technologies. The virtual prototyping execution environment needs to be converted between different systems. Its integration includes the following aspects:
â— Create a three-dimensional model of the mechanical system in the CAD environment and perform a simple analysis of sports performance;
â— Convert the geometric model into a geometric model in the CAD system, and import the virtual prototype analysis system to perform kinematics and dynamic analysis;
â— The load in the virtual prototype is passed to the finite element analysis software, and the latter's analysis results are passed back to the virtual prototype.
â— The specification of the production line model and its control system is integrated with the virtual prototype.
2) System parameterization To establish a parametric virtual prototype system, the virtual prototype system can be repeatedly tested on the premise of multiple simulation parameters, and the simulation output results under various conditions are analyzed and compared to lay the foundation for further system optimization.
3) System Optimization Virtual Prototyping Solution Under the premise of multi-parameters and virtual verification of the system, the designer needs to select a solution to provide optimized system parameters and design results.
4) System Visualization and Interactivity The system provides a good model display environment, enabling the operator to have a high sense of immersion. Due to the advantages of visualization, the designer can interactively explore the functions of the virtual mechanical system during the design process, simulate the real environment and repeatedly debug the virtual prototype, and fully integrate their own experience and capabilities into the design process of the computer's virtual prototype. .
3. Industrial robot virtual prototype 3.1 Robot digital virtual prototype system The robot virtual prototype system combines robot research and virtual prototyping technology, aiming at kinematics, dynamic analysis, trajectory and path planning in the robot design and manufacturing process, and robots. The technical content of the interaction with the work environment and other technical contents are used for research and system development. In the virtual environment, the design and analysis of the robot and the realization of the virtual production process are completed. The specific structure of the system is shown in Figure 1.
Figure 1 Robot Virtual Prototyping System
3.2 Functions and Technical Features of Robot Virtual Prototyping System The core function of the robotic virtual prototyping system is to provide a virtual environment for robot design and development on a computer. Its main functions are as follows:
1) Visualization of the robot virtual prototyping system Visualization is the basic work of the virtual prototyping system, and CAD geometry modeling is the core. The robot virtual prototype visualization environment has the following features:
â— The visualization environment of the robot manipulator is realized on the computer, and the operator can intuitively and efficiently perform the design and development of the robot on this basis. The good environment enables the operator to conveniently dissolve his/her own experience and knowledge at any time;
â— Extract geometric data from the CAD model and use it in further working processes of the virtual prototyping system, such as motion analysis and dynamic simulation;
â— At different stages of virtual prototype development, robot CAD models differ in structure. During the initial design phase of the prototype, the CAD geometric model of the robot may be sketchy. It is only necessary to meet current design needs. Some detailed geometric structures may not be modeled; in the detailed design stage, the prototype is repeatedly verified and improved, and the system is optimized. The geometric data can be used to perform detailed geometric modeling of the prototype to form the robot simulation results of the entire virtual prototype.
2) The robot work process is pre-determined. According to the robot manipulator body composition, including the various parts of the geometry and parameters, the number of joints, types and other factors, through the forward and reverse motion equations to solve the simulation of the robot's motion analysis. At the same time, in the process of motion analysis, it is also possible to carry out simulation research on the robot's motion space analysis, work trajectory planning, collision, and interference check.
3) Dynamic analysis of robot virtual prototyping Dynamic analysis is performed by adding physical information, such as the type, quality, rotational inertia, joint friction and other physical factors of the manipulator in the virtual prototyping system. In the process of dynamic analysis, it is possible to simulate the actual working conditions of the robot manipulator to preload the virtual prototype, or to apply the force of gravity, so as to analyze the force of each part of the prototype in various working conditions, to study the key links, and optimize the system structure. .
4) Robot Control System Simulation The robot virtual prototype can provide the control system simulation environment and test the control system. In this respect, the virtual prototype has obvious advantages over the physical prototype. Various control methods can directly act on physical prototypes, saving time and efficiency, without worrying about erroneous control methods resulting in damage to the prototype.
The robot virtual prototype system has the following technical features:
1) Provide integrated system for robot simulation research and digital robot design and verification. The environment robot virtual prototyping system provides a unified data platform including digital modeling, visualization of motion process realization, kinematics analysis, and control system simulation, enabling each part of the The simulation and analysis results are used in a timely and efficient manner to provide a digital research environment.
2) The organic components that make up the digital virtual manufacturing environment The industrial robot is the basic working unit in the manufacturing system. The robot virtual prototyping system can effectively dissolve the digital processing and manufacturing environment at a higher level and meet the upper production line of the robot work unit in the virtual manufacturing environment. Simulation and digital plant requirements form the basis and organic part of the digital robot production line.
3.3 The technical means of the robot virtual prototype system 3.3.1 The use of high-level geometric modeling tools With the development of software technology, commercial three-dimensional modeling software such as Pro/E, UG and SolidWod ~ can already be successfully Works on a computer platform without the need for a professional graphics workstation. All of these softwares can establish a high fidelity virtual prototype machine geometry model, and at the same time have a variety of geometric data conversion formats such as IGES, STEP and Parasolid to provide the geometric data needed during the design and testing of robot virtual prototypes. Prototyping geometry development tools.
3.3.2 Development Tools for Robot Virtual Prototyping Systems There are two types of development tools for robotic virtual prototyping systems. One is the use of generic software development tools, and the other is professional virtual prototyping or robot development software. The former is currently more commonly used in C + +, earlier Fortran, Pas. Cal and so on. The features of the robot virtual prototyping system developed using general-purpose software are that the software is highly targeted and solves the designer's specific problems. However, to establish the necessary detailed and correct models for the kinematics and dynamics of prototypes requires a lot of time and effort, and the developed systems have poor flexibility and are difficult to adjust.
Adams, Envision, etc. are commercial virtual prototyping tools...1, software can create simple geometric models or external robot CAD models that have already been established. The system provides kinematics, dynamics, and other aspects of simulation capabilities, and builds robots. Virtual prototype design and optimization environment, and has a perfect simulation results data processing capabilities. Software allows designers to free themselves from tedious robotic dynamic modeling processes and devote more energy to the virtual design and verification process of prototypes.
4. Concluding remarks The virtual prototyping technology is applied to the field of robot simulation research, and the research and development of virtual prototyping of robots is carried out. On the one hand, the scope of research and application of virtual prototyping technology is expanded. At the same time, the design and analysis of robotic products under the virtual environment is also a digital design in the future. The direction of manufacturing. Through the application of virtual prototype technology in robot simulation research, designers can be freed from the tedious calculation process, invest their energies into the analysis and optimization process of the virtual prototype system, effectively perform system evaluation, and provide optimization before actual production. Design products.
Brass Couplings,Push Connect Air Fittings ,Push Lok Fittings ,Push Lock Air Fittings
Valves & Parts Co., Ltd. , http://www.sinocorpmetal.com